Robot Inventor スクラッチ編
スクラッチで下記の命令が実行できるスケッチを作成します。
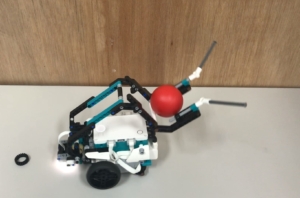
① ボールを感知して停車
② ボールを上にあげる
③ 180度回転
④ ボールを下す
目 次
- プログラム開始
ボールを移動するスケッチを分けて説明します。
Ⅰ)ボールを感知して停車
Ⅱ)ボールを上にあげる
Ⅲ)180度回転
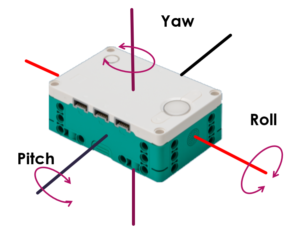
6軸ジャイロスコープ
Ⅲ)ボールを下す
コントローラを状態を知る - ボールを移動するスケッチ (一括スケッチ)
- コントローラを状態を知るには
- 90度2回に分けて回転する方法
- サブルーチンを作る
90度 2回転
For文 - コントローラ の アクセス方法
USBケーブル
Bluetooth - まとめ
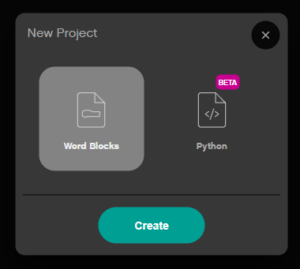
Ⅰ Word Blocks(スクラッチ) を選択し、Createを押す。
Ⅱ スクラッチの画面が現れます。
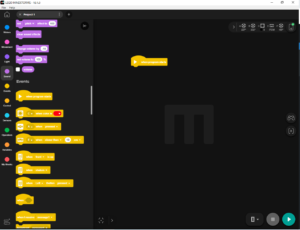
○イベントの中の スタート ブロック
標準は

他のにも
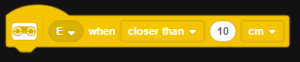
超音波センサが10cm以下になった時開始等があります。
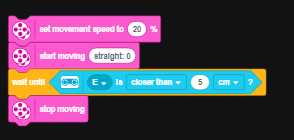
Ⅰ)ボールを感知して停車
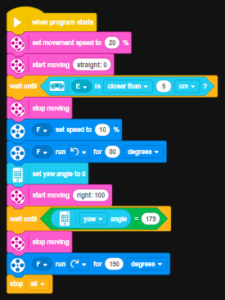
・車体にぶつからない位置で停車するために モータの出力を調整する。超音波センサがボールの距離を測定し、条件が一致したら停車する。
Movement から 移動のスピードを選択 設定 20% 出力
Movement から 移動を選択 設定 真っ直ぐ進ませるため 0
Contral から ~まで待つを選択
Sensors から 超音波センサの上記の形状にはまるものを選択 設定 5cm以下
Movement から 停車を選択
Contral から ~まで待つを選択
Sensors から 超音波センサの上記の形状にはまるものを選択 設定 5cm以下
Movement から 停車を選択
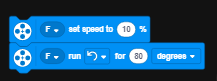
Ⅱ)ボールを上にあげる
Motors から モータのスピードを選択 設定 10% 出力
Motors から モータを反時計回りで X 度動かす。 設定 80度
※ モータのスピードが速いとボールはよく飛びます。ですので、モータの出力を抑えて下さい。
Motors から モータを反時計回りで X 度動かす。 設定 80度
※ モータのスピードが速いとボールはよく飛びます。ですので、モータの出力を抑えて下さい。
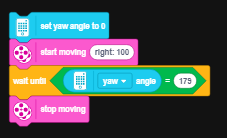
Sensors から 6軸ジャイロスコープ の yaw の 0度 設定 を選択
Movement から 移動を選択 設定 小回りで回転させるために 右回転 100
Contral から ~まで待つ を選択
Sensors から 6軸ジャイロスコープ yaw を 選択
Operators から 演算でイコール を選択 設定 179度
Movement から 停車を選択
※ 180度以上の場合は暴走する。現時点では179度が限界です。
Contral から ~まで待つ を選択
Sensors から 6軸ジャイロスコープ yaw を 選択
Operators から 演算でイコール を選択 設定 179度
Movement から 停車を選択
※ 180度以上の場合は暴走する。現時点では179度が限界です。

リンク
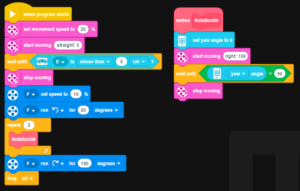
上記の個々の解説を統合して表示しました。

コントローラのアイコンをクリックすると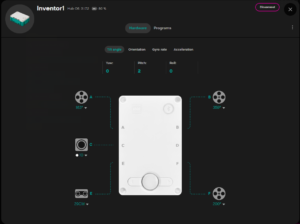 が現れジャイロやモータの状態が確認できます。
が現れジャイロやモータの状態が確認できます。
USB より Bluetooth の方が ケーブルが無い分使いやすいです。
下記の動画のスケッチを作成します。
180度を一度には移動出来ないため、90度を二回移動します。
① ボールを感知して停車
② ボールを上にあげる
③ 90度回転を2回
④ ボールを下す
② ボールを上にあげる
③ 90度回転を2回
④ ボールを下す
 block name から Rotation90 の変更後 SAVE をクリック
block name から Rotation90 の変更後 SAVE をクリック

サブルーチン用のブロックが作成されます。
 で構わないが、
で構わないが、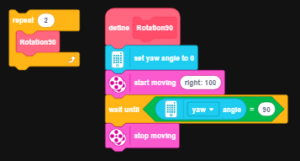
〇 180度回転と 90度 2回 の差し替え
コントローラのアクセスには2種類あります
・USBケーブル
・Bluetooth
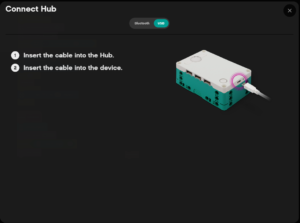
コントローラのアイコン をクリック

○ USBケーブル
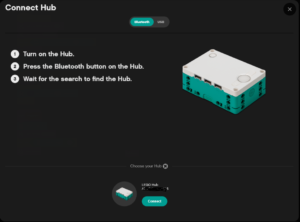
 〇 Bluetooth
〇 Bluetooth
③まで表示したら 下の Connect をクリック
180度移動する場合はサブルーチンを用いた方が、実用的です。
| 180度回転 | 90度 2回 |
|
 |